
Visions of the future are the domain of science fiction—imagine a world where some fantastic thing is possible. The FAA presents its own vision in the Performance Based Navigation Roadmap, which is produced about every five years. The third edition is expected around the time you get this. In it the current status of performance-based navigation, PBN, a generalized term for RNAV and RNP (required navigation performance), is analyzed and goals are set for the near, intermediate and long term—each roughly five years apart.
The roadmap has been quite accurate at forecasting the future. For example, this is from the first roadmap produced in 2003 discussing the 2016-2020 timeframe: “At the end of this period, operators will use RNP-based RNAV universally in all domains, with the retention of a minimal operational network of ground-based NAVAIDS used as backup.”
That sounds remarkably like what is happening with NextGen and the Minimum Operational Network (MON).
Hinted in earlier editions, but made explicit in the 2016 version, is the idea of navigation resiliency. This focus resulted from the head honcho in the Executive Branch issuing a Presidential Policy Directive on critical infrastructure security and resiliency. The directive notes that critical infrastructure and essential services “underpin American society.” Resiliency is defined as “the ability to prepare for and adapt to changing conditions and withstand and recover rapidly from disruptions.”
The resilient future the FAA envisions is probably different from what you expect and the MON won’t be a big part of it. Instead, a new system for positioning, navigation, and timing will be used. Here are the front-running candidates and what it means for us.
The Future
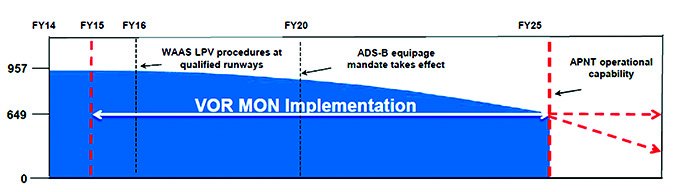
The Minimum Operational Network (MON), which Fred Simons described in “GPS Backup Strategies” in our February 2016 issue, bridges a gap to the future. It’s a minimum number of VORs and ILSes designated to remain in service during the transition to RNAV. The whole network will be re-evaluated in 2025 when an alternative position, navigation, and timing system will hopefully be in service. Additionally, the MON is subject to a cost/benefit analysis. Since the network is designed to meet “a subset of NAS [national air space] users,”—that’s us—the cost-versus-benefit ratio to the general public could result in a loss of funding.
Alternative position, navigation, and timing (APNT) is just like it sounds: An alternative (to GNSS) method of determining position, navigation, and time. The current hopefuls are DME/DME, eLORAN, and MEMS-based Navigation. (More acronyms: GNSS is Global Navigation Satellite System, a generic name for GPS, GLONASS and similar systems.)
While the government is slashing funding for VORs, it’s adding DME locations. The Roadmap indicates that “the NextGen DME program will expand DME coverage” providing DME/DME RNAV capability down to 1500 feet around the country’s busiest airports by 2025.
DME/DME works by knowing the location of DME stations and measuring the distance from multiple stations. It only takes two DME rings to locate a position, but the more the better. The system is attractive because most transport category aircraft already utilize it as part of multi-sensor flight management systems. Additionally, there is a long history of its use so its performance capabilities are well known. Charts already contain notations of DME/DME restrictions for RNAV.
Many higher-end aircraft feature two DME receivers. Unfortunately, effective DME/DME RNAV requires a scanning multi-channel DME receiver, which few have because of the expense. Garmin’s Bill Stone indicated a scanning receiver would cost $20-25,000. Higher-end Garmin installations targeting business jets do have DME/DME navigation capability.
If installing a scanning multi-channel DME receiver doesn’t fit into the family budget, the next APNT option will have you running to the aircraft junkyard; long-range navigation, or LORAN.
Last year, H.R. 1678 was introduced in the House of Representatives, noting that, “Since 2004, the Federal Government has recognized that the absence of a reliable backup system for GPS is a glaring economic and security threat to the United States, and has reaffirmed its interest in developing an enhanced long-range navigation system (LORAN), or eLORAN, as a reliable land-based backup for GPS signals.”
The Past—Again
The bill would require LORAN to be fully operational “not later than three years after the date of the enactment of this Act.” In June, 2015, Congressman LoBiondo, who sponsored the bill, flipped the switch powering the first recommissioned LORAN station. LORAN could become the international standard for APNT. A report by the FAA on alternative means of timing noted that other countries, particularly the UK and France are also pursuing eLORAN as a backup for GPS.
LORAN determines location in a method similar to DME/DME. A receiver measures the time difference of signals from master and slave stations. This difference creates a line of position, like a DME distance. Two lines-of-position define the receiver’s location where they overlap. This requires at least three stations—a master and two slaves. Not coincidently, three is the smallest LORAN chain.
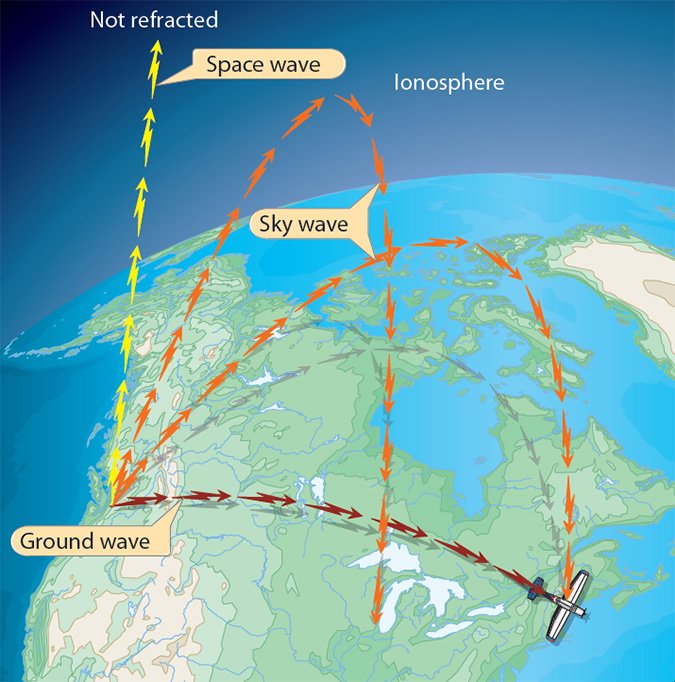
LORAN utilizes low frequency radio waves (~100 kHz). Unlike higher frequency signals that are line of sight (termed space waves), low frequency waves are ground waves. They follow the ground, which is great for long range navigation because the curvature of the earth limits line-of-sight. Ground waves work particularly well over a level surface like the ocean, hence LORAN’s popularity with mariners. It has a range of up to about 1500 miles.
The newest update to LORAN, called enhanced LORAN (eLORAN), adds a WAAS-like feature. In eLORAN, a data channel is added to the signal. This signal will allow for differential LORAN corrections improving the accuracy from 460 meters for the last generations LORAN-C to 20 meters for eLORAN; allowing for LNAV approaches.
While LORAN is a relic, MEMS-based navigation is right out of the Jetsons. In an interview with Ashton Carter, the U.S. Secretary of Defense, he forecasted that 20 years from now, “everything you have that is manufactured for you, including your phone, will have on the chip a clock, a gyro and an accelerometer. It’ll be set the moment it’s manufactured and henceforth it will forever know what time it is, where it is, what its spatial orientation is. And it will never need a satellite.” (Quoted in Inside GNSS.)

Mirco-Electro-Mechanical Systems (MEMS) gyroscopes already inhabit many devices; cars, smartphones, tablets, gaming devices, and cameras. MEMS gyros and accelerometers gained widespread usage in automobile electronic stability control systems. This drove down prices resulting in cost reductions even in the higher-quality attitude and heading systems in aviation. At the low end, MEMS are so affordable they inhabit most consumer electronics.
MEMS gyros work utilizing two counter-vibrating platforms. Rotating the platforms creates a Coriolis force. This force causes a change in capacitance, the amount of which is related to angular acceleration. Angular acceleration is an essential component of gyro-based, inertial navigation systems. These systems navigate by tracking accelerations over time to know how far and in what 3D direction it has moved. Once a starting point is known, the system can track where it goes from there.
A gyro’s angular random walk and bias will result in a difference between the calculated and actual position. This is drift. Unfortunately, MEMS gyros drift. During a 2010 interview with MEMS Journal (yes, there is such a publication), Honeywell Aerospace’s Dr. David Arch mentioned:
“If one is to look at ultimate performance, however, RLG [Ring Laser Gryo] and FOG [Fiber Optic Gyro] technology is a factor of 1000 times better in terms of bias stability and bias repeatability compared to MEMS. ARW [Angular Random Walk] for MEMS is a factor of ten to hundred times greater than RLG or FOG.”
The result is that MEMS gyros cannot maintain high enough accuracy to be used for inertial navigation. For now.
Military funding could go a long way to reduce drift. During a 2014 interview, the head of the Defense Advanced Research Projects Agency (DARPA), Microsystems Technology Office indicated that MEMS gyros are improving, but the price of a high performance MEMS gyro is comparable to a FOG or RLG system. The main advantage of these super-pricey MEMS is their small size.
GPS Armageddon
While the military pursues a positioning system that will work in caves, mountains and underground, this is unnecessary for most users. Worrying about a GPS signal failure is like fretting about a mega-asteroid hitting earth. Unless you’re a Hollywood writer, there isn’t much you can do about it and the chances of it happening are minimal. Signal reliability from the constellations is superb. For the most part, outages of GPS signals are the direct result of DOD action. Receivers that can pick up more than one constellation can limit government interference. But, sometimes it’s nice to be ready for the inevitable.
The North American Electric Reliability Corporation identified natural and man-made threats to GNSS. Natural threats are space weather and collisions from other objects. Man-made risks include unintentional interference and intentional jamming or spoofing.
GNSS signals are extremely weak. It’s been described like trying to watch a 100W lightbulb when flying at 65 million feet. This leaves the signal susceptible to interference. In 2009 it was discovered that the degraded performance of a Lockheed Martin built GPS satellite was caused by test frequencies on the rig reducing the accuracy of the signal. Additionally, a flaw in some maritime television antennas inadvertently turned them into GPS jammers. Personal GPS jammers, available on the web, are popular among delivery drivers who don’t want their bosses tracking their every movement.
What’ll It Be?
Unlike Nostradamus, the FAA’s prognostications have limited durations with frequent updates. The newest update to the FAA’s Performance Based Navigation sets the tone for FAA initiatives over the next 15 years.
Center stage in the third edition of the roadmap is navigation resiliency. How will pilots navigate if something happens to GPS? What backups should the FAA and government support?
Expanding the MON or adding ILS approaches isn’t the solution. The MON is a bridge, mostly for GA, to an alternative means of position, navigation and timing.
The top three contenders for APNT are DME/DME, eLORAN, and MEMS-based inertial navigation. DME/DME is already widely used in large aircraft but the price-tag will almost certainly remain out of reach for the piston crowd. LORAN might be a cheaper alternative. It is a system the Coast Guard has experience operating, avionics OEMs are familiar with the technology, and an international standard already exists. MEMS-based navigation, although sounding really cool, will require a technological revolution. Secretary Carter sounds more like Isaac Asimov when discussing it than a man concerned with practicality.
Whichever resilient solution is chosen, you’ll need to be ready. And if you drive a DeLorean to the past, grab a dusty Aeronautical Information Manual from the hangar, the section on LORAN might be useful back in the future.
Jordan Miller’s day job lets him use million-dollar gyros and multi-channel scanning DMEs to navigate, but he’d prefer a GPS with WAAS.



