
Full-regime automatic flight control systems (AFCS) consist of at least a flight director (FD) and an autopilot (AP). “Full regime” means the AFCS has enough modes to control the aircraft from after takeoff to short final. It also means the AP controls the trim to operate over the full airspeed and centerof- gravity envelope. Selecting different modes and resetting the altitude preselector will be required during the flight, but you can leave the AP engaged throughout the flight.
The FD computes what to do and the AP servos provide some muscle to move the control surfaces. But the real muscle, like with the human pilot, comes from the autopilot using trim to keep control forces from becoming excessive.
Remember the mantra, “aviate, navigate, communicate”? The full-regime AFCS takes on a major portion of “aviate,” like a copilot. In fact, the FAA only allows single-pilot operation of jets with a functioning autopilot.
Then, the flight management system (FMS/GPS) helps with the “navigate” part. Coupling the AFCS to the FMS makes a complete package, especially with VNAV (vertical nav) capabilities that take all the tedium out of hitting vertical restrictions.
The full-regime AFCS allows the pilot to be the system manager rather than having to hand fly. This allows more concentration on ATC instructions, the “communicate” part. A fullregime AFCS used to be limited to air transport aircraft and heavy iron corporate jets, but today it is becoming more common on many light aircraft and is probably the single best safetyenhancing device onboard—when used properly.
AFCS Basis
Let’s first explore how the AFCS operates before we talk about how it can get you into trouble.
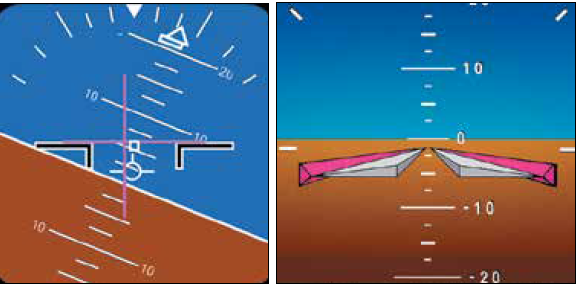
The flight director is displayed on the attitude indicator as crosshairs or inverted v-bars that are the computer’s idea of the attitude of the aircraft needed to reduce the error (gradually to zero) between the pilot’s selected target and the actual value.
For example, if the pilot is in a climb and has selected airspeed mode at 130 knots but actual airspeed is 120 knots, the FD computer will reduce the pitch cue. The pilot, if manually following the FD, or the autopilot, if engaged, will follow the cue and lower the nose. Later the pitch trim might need to be adjusted—manually by the pilot or automatically by the autopilot—to maintain zero elevator force. There are damping factors like rate of change of airspeed that provide smooth transitions and tracking once the target is reached. But the damping factors are secondary to reducing the error to zero.
This same concept of the difference between actual and target attitude creating an error signal is the basis of all vertical and horizontal FD modes. In heading mode, for example, the target is the heading bug and the difference between it and the actual heading creates the heading error signal.
The autopilot continuously senses the force on the servo and trims the aircraft to remove any steady-state force. If it didn’t, its weakness would result in an extremely limited operational range. Using trim, the autopilot can operate over the full range of airspeeds. Inattention to the trim is the biggest area where the autopilot can quickly become your foe. Momentarily overpowering the autopilot—which you shouldn’t do—is relatively easy; overpowering the trim is not. We’ll get back to that.
Normal Operation
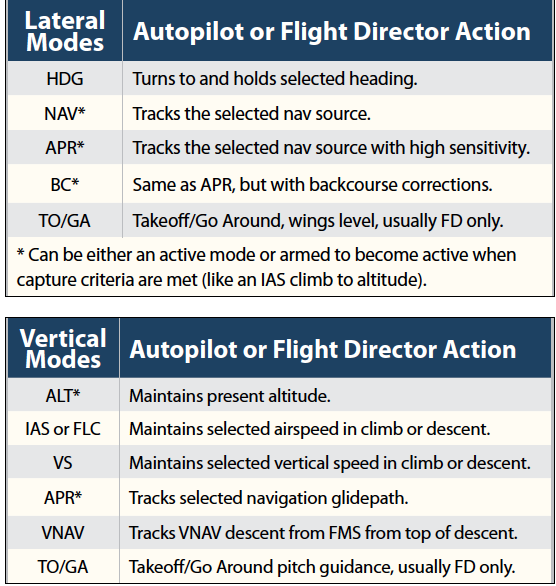
Some systems have a takeoff mode that provides pitch guidance for takeoff. In the old days, this was a fixed-pitch command that would provide a safe climb speed (approximately V2) in case the engine failed. Some of the newest systems provide a variable pitch queue that rises at Vr and then transitions to capture and to track V2. The FD also provides wings level roll guidance on takeoff. It is activated via the TO/GA button on the throttle levers. This is an FD mode only, as the autopilot is not normally engaged below 400 feet AGL
In the climb, there are a couple of options. In Vertical Speed (VS) mode, you select the rate of climb for the system to maintain. But when climbing to higher altitudes, the AFCS will continuously increase the pitch to try to maintain the selected climb rate and the airspeed falls off—one of the AFCS traps discussed below.
If set properly, pitch mode can work well, but still requires monitoring. But many of us have a tendency to set the pitch for a given vertical speed, thus creating the same risk.
Most experienced pilots prefer flight level change (FLC) or IAS for the climb. On getting an altitude clearance, you should generally select the new altitude first so the AFCS knows if it is going to climb or descend. Then, you set a safe IAS to maintain, manage power, and the AFCS handles the rest. When close to the selected altitude the AFCS will capture and hold the altitude by controlling pitch (and trim).

All these modes are vertical modes, and they work in descent just like they work in a climb. You might choose FLC/IAS mode and set a moderately high airspeed for the descent, or use pitch or even VS mode. Note that in non-pressurized aircraft, using VS with, say, 500 fpm, can maintain reasonable comfort for your passengers.
Finally, if so equipped, vertical nav (VNAV or VNV) more closely couples your FMS by instructing the AFCS to reach a specified altitude by a specified waypoint, much like coupling to the advisory “+V” on RNAV approaches.
Common lateral modes are simply heading (HDG) to track the heading bug such as when you’re being vectored, and navigation (NAV) where the heading is continually adjusted to track a nav source, either VOR or, more commonly, GPS. Like a vertical mode to capture the selected altitude and hold that, heading mode can be used to capture and track a nav source on most AFCS.
The approach phase will usually start in altitude hold with vertical approach guidance (glide slope or RNAV glide path) armed. The AFCS will maintain altitude until the glide slope is captured or the RNAV top-ofdescent is reached. Likewise, in the lateral axis, the AFCS will normally be in HDG mode while on vectors to intercept the localizer, VOR radial or RNAV (GPS) approach course. On approach you should be extra conscious of what mode the AFCS is in and what mode is armed both vertically and laterally.
Many systems offer go-around FD commands. The pitch cue will be for a safe climb speed and the lateral cue will be for wings level. After reaching a safe altitude the AFCS can then be coupled to FMS missed approach navigation by selecting NAV. A few systems allow the coupling to the AP in go-around mode.
AFCS traps
We’ve covered the basics of using the AFCS for a safe and relaxed flight. Now let’s see how that can all go wrong in a hurry by inattention and misuse of the system. The AFCS is like having a copilot who’s a great stick, but has no judgment. It only does what you tell it to do and what the design and software engineers thought the system should do.
When the aircraft gets into a situation or simply an attitude that the engineers didn’t know how to handle or just didn’t anticipate, the autopilot disengages and dumps the problem back to the pilot—usually when the pilot is least expecting it. This can happen for a hardware failure of some type, or simply if, for example, the autopilot has run out of trim trying to maintain altitude with insufficient power, or excessive drag, like from ice.
On, or Off?
Each sensor feeding the AFCS has a validity signal that is checked continuously by the AFCS. Plus, t h e AFCS checks that the sensor’s value is reasonable. Failure of a required sensor is generally not a sudden problem as the autopilot disengages, because the AP will normally have the aircraft in trim. But, there have been accidents where the pilot thought the AP was engaged when it had disengaged such as the Lockheed L-1011 accident in the Everglades years ago. To make this less of an issue, AP certification now requires both an aural and visual annunciation of automatic AP disengagement. However, always keep an eye on the status especially during approach.
What Mode?
Another one of the traps is not keeping track of system mode. The mode display—always on the autopilot controller itself, but also often repeated either on the primary flight display or nearby—is critical in monitoring what your idiot co-pilot is doing. Having the ability to arm mode transitions (for example, HDG to NAV, or altitude hold to approach) is a major feature of a full-regime AFCS. But, losing track of which mode is armed and which is active can quickly get you into trouble. Additionally, don’t be too quick to arm the approach (APR) mode on an ILS approach lest you capture a false beam above the normal glideslope. If that happens, you could get a wild ride.
Automatic Trim
Trimming until there is a problem was an element in the tragic Colgan Air Dash 8-Q400 accident in icing conditions. The accident report states “… because the autopilot altitude hold mode was engaged when the airplane leveled off at 2300 feet, the autopilot continued to add nose-up pitch trim to maintain altitude as the airspeed slowed. During the time that the low-speed cue was in view, the airplane’s pitch trim increased from one degree to seven degrees nose up, and the pitch attitude of the airplane increased from three degrees to nine degrees nose up. Neither pilot remarked about the increasing pitch attitude, even though it was a cue indicating that airspeed was slowing. In addition, the numbers on the airplane’s IAS display changed from white to red as the airplane reached the calculated stick shaker activation speed. About 2216:27, the stick shaker activated at an airspeed of 131 knots … and the autopilot disengaged as designed.” The flight crew was unprepared to handle the aircraft when the autopilot disengaged.
To keep your AFCS from becoming a foe, you must keep track of the pitch trim. Watch for both pitch trim runaway plus a slow progression toward full nose down or nose up trim as Colgan experienced.
Vertical Speed Climb
Vertical speed mode can be useful, but if not monitored can also lead to an out-of-trim situation. Here the target is a selected vertical airspeed and the AP closes the loop by pitching to remove any error between the target vertical speed and the actual vertical speed.
Say you’re cleared to climb and you select a moderately high vertical speed target. It works fine initially but as the aircraft climbs, the autopilot will increase the pitch to maintain the selected vertical speed. The airspeed will begin to decay. If you don’t gradually reduce the vertical speed target, the AP will keep pitching up, and trimming, to maintain the selected vertical speed. The airspeed will continue to decay until the stall warning. Upon manual or automatic AP disconnect, you get an aircraft with near full nose-up trim, requiring an unnaturally strong push of the elevator, and loss of altitude, to regain airspeed.
Yes, some of the newest autopilots have over-speed and under-speed protection, pitching to avoid the condition. However, most systems use the published stall speeds for under-speed protection. Remember that an aircraft can stall at any airspeed but only one angle of attack (AOA). Does the AFCS use AOA or increase the protection for load factor (turning flight)? Does the AFCS consider the change install speed with weight change? Most light aircraft AFCS don’t. Bottom line: IAs or Flight Level Change (FLC) provide more safety for autopilot climbs.
No Assistance Needed
Finally, you can turn your friend into a foe very quickly by trying to help. The worst ILS I was ever on was with a pilot who thought the AP needed some help to follow the glideslope. Without using the Control Wheel Steering (CWS), which permits such pilot input, the pilot moved the yoke to try to help the tracking. The AP sensed the extra force on the servo as an aerodynamic force requiring it to retrim the aircraft. Ultimately, he and the AP got out of sync. It was a wild ride. Cardinal rule: Unless you are using CWS, never move the yoke with the AP engaged. There can only be one pilot flying the aircraft. If you don’t like how your brainless copilot (AP) is flying, disengage it and fly it yourself. But don’t help.
With any tool, you must know how it operates. You don’t need to know the inner workings, but you must know under what conditions it will automatically disengage and what each mode does and why. You also must keep track of the trim. With a good understanding of the system, you can have a lifelong friend who will help you fly safely and accurately.
(Note: This article was written as a general guide, not the absolute word. Each AFCS is different and your specific Pilot’s Guide and Flight Manual Supplement are the final authority.)



